LIDAR Hazard Map Algorithms for Planetary Landing
Programme Reference
GT13-402SA
Status
Closed
Country
Germany
Start Date
2021
End Date
2023
Programme: GSTP Prime Contractor: JENA-OPTRONIK GMBH
Objectives
The objective of the activity is to optimise and implement the hazard map algorithms in Matlab environment, and to specify the associated VHDL to be later embedded in FPGA.
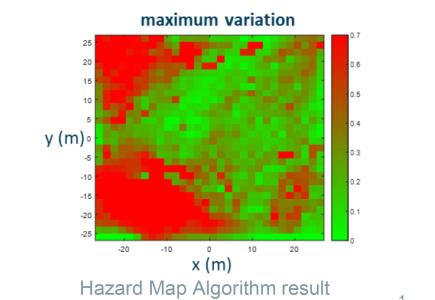
Description
LIDAR for GNC developments in the past years, targeting rendez-vous applications, have proven to be a very successful product in the world market. This LIDAR can also be adapted for other scenarios and in particular for landing applications. There is quite a high demand for this type of product which is not available yet on the market.;The core development in the activity consists in on-board algorithms to generate a Hazard map based on the raw measurements gathered by the LIDAR. These algorithms will be in a second step implemented in the RTG4 re-programmable FPGA present within the RVS3000-3D. A landing LIDAR needs to be able to acquire high fidelity 3D point clouds of planetary surface as it would be required for the application of hazard detection and safe landing spot selection algorithms. The main goal of the algorithms is ultimately to map a target area and to detect potential obstacles, which are usually in the size of 15-30cm. The generated ?Hazard Map? can then be used by GNC for definition of a safe landing site for the lander.;This activity will encompass the the following tasks :Design adaptive scanning algorithms for the RVS-3000 3D to control the scanning motion in order to ensure a uniform lunar surface scan despite the platform motion. Optimise and implement the algorithms developed in the previous activity. Issue the VHDL specification and confirm the feasibility of implementation on the RTG4.
• Application domain: Exploration
•
Technology Domain:
5 - Space System Control
5 - Space System Control
•
Competence Domain:
3-Avionic Systems
3-Avionic Systems
• Initial TRL: TRL 3
• Target TRL: TRL 4
•HarmoRoadMap: AOCS Sensors and Actuators II (2015.2)
•IPC Document: ESA/IPC(2020)61,add.2