Assessment of onboard DA state estimation for spacecraft relative navigation
Programme Reference
16/R03
Country
Italy
Start Date
2016
End Date
2017
Programme: Discovery Prime Contractor: POLITECNICO DI MILANO
Description
The goal of this study is two-fold. First, to identify and develop a DA- based high-order filter for relative pose estimation. The application considered is the rendezvous with an uncooperative target, modelled after ESA's e.deorbit mission. Secondly, the DA algorithms are implemented on hardware mimicking the limited computational power available in space. The resulting implementation is tested in a processor in the loop (PIL) test-bench using the approach phase of the chaser to the uncooperative target to be estimated.
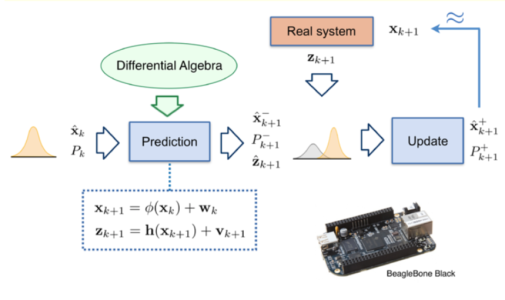
At the present time the extended Kalman filter (EKF) is the main algorithm used for trajectory estimation. The EKF is based on the main idea of linearizing the equations of motion and the measurement equations via first-order Taylor expansions around the current mean and covariance.
In some cases, however, the linear assumption fails to provide an accurate realization of the local trajectory motion. In such cases, a different method that accounts for the system nonlinearity must be used. Unscented Kalman filter (UKF) yield superior performance with respect to the EKF in highly nonlinear situations. However, in practice, the UKF is often slightly slower than the EKF. In 2007 Park and Scheeres developed a nonlinear filter named higher-order numerical extended Kalman filter (HNEKF) by solving for the higher-order Taylor series terms. These higher-order filters are more accurate than the EKF but require the derivation of the higher-order tensors.
The calculation of these tensors is straight forward using Differential Algebra techniques. This eliminates the need to calculate the higher- order tensors. An open question is how the computational overhead associated to the calculation of the polynomials affects its applicability to onboard applications.
In this work we implement a pure C version of the DA core engine, and then assess its performance and onboard applicability of the DA-based HNEKF algorithm with the target application of estimating the relative pose between two spacecraft during a rendezvous manoeuvre. The assessment is performed on a BeagleBone Black embedded platform, similar to future space computational platforms.
• Application domain: Generic Technologies
• Initial TRL: TRL N/A
• Target TRL: TRL N/A
•Public Document: