Mimicking the thigmotropic behaviour of climbing plants to design a tactile-based grasping device for the space environment
Programme Reference
2012-24
Country
Italy
Start Date
2012
End Date
2013
Programme: Discovery Prime Contractor: University of Bozen
Description
Investigating and finding innovative concepts and solutions to understand and mimic the grasping and pulling behaviour of tendril bearing climbing plants.
Methodology:
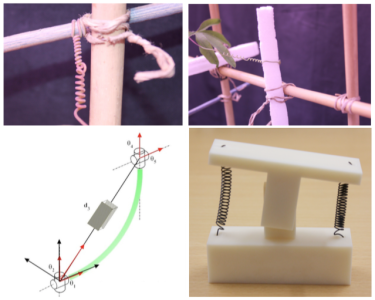
This work aims at studying the rules and strategies behind the climbing plants that exploit tendrils from a bio-mimetic point of view. Such analysis will tackle these aspects to “read" the natural grasping behaviour also from an engineering point of view. Indeed, a robotic design phase requires a deep comprehension and evaluation of the plants principles. Pea and passiflora plants have been chosen to monitor and study the tendril behaviours: circumnutation, coiling/grasping and free-coiling.
Plant behaviour has been translated into engineering models, rules and ideas. Different materials and techniques have been evaluated both to set-up future effective bio-mimetic mechanisms and to validate the experimental observations.
A robotic approach has been exploited to describe and simulate from a kinematic point of view a bio-inspired robotic tendril.
A practical realization of a modular bio-inspired grasping robotic tendril has been designed together with a proof-of-concept of a section for the modular structure.
• Application domain: Generic Technologies
• Initial TRL: TRL N/A
• Target TRL: TRL N/A
•Public Document: