European Space Debris Suppression (eSpades)
Programme Reference
S 2020-06-a
Status
Closed
Country
Italy
Start Date
2021
End Date
2022
Programme: Discovery Prime Contractor: University of Rome `Tor Vergata`
Description
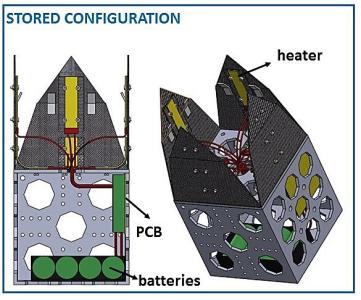
Space debris is mainly constituted by small items which cannot be de-orbited by using specific satellites launched from the Earth due to costs and difficulty in miniaturizing robotic arms or other rigid actuation systems. In a long-period vision, small cleaning satellites, with a size comparable with the debris to remove, can be manufactured in Space. Traditional robotic systems would be extremely expensive and some also would have problems in grabbing objects with undefined shape. Grabbing loads could result in debris fragmentation whereas fine tuning of the grabbing procedure would lead to not acceptable costs. Moreover robotic systems are too much complex for in-Space manufacturing. It is evident that an innovation is necessary in materials, and shape memory polymer composites (SMPC) are optimal candidates. SMPC can freeze a non-equilibrium shape (open) and recover the equilibrium shape (closed) by heating. Heaters and sensors are integrated in the SMPC structure during manufacturing. These smart structures can be easily produced in Space with a very simple structure which can be tailored on the size of debris to remove. They do not apply loads during grabbing with the result of optimal debris containment. Moreover, shape recovery rate is low, and debris approach and capture are managed with sufficient time. Also rotating debris can be captured while reducing the risk of structure damaging or debris disengaging by SMPC device re-opening. In fact, the SMPC works as a damper during recovery and becomes stiff only after freezing. This project aimed to define, for the first time, the optimal SMPC geometry for debris capture. Our laboratory experiments so far had shown the ability of SMPC structures to grab simple objects but an optimal configuration for Space debris was necessary. Numerical modelling has been made as well as laboratory prototypes, with integrated heating systems, for testing device functionalities. Results show the very good behavior of the SMPC device for grabbing small debris, damping its rotational speed during the approach.
• Application domain: Space Safety
•
Technology Domain:
11 - Space Debris
11 - Space Debris
• Initial TRL: TRL N/A
• Target TRL: TRL N/A
•Public Document: