Autonomous uLtrasound image Improvement SyStEm (ALISSE)
Programme Reference
T314-506MM
Status
Closed
Country
Spain
Start Date
2020
End Date
2023
Programme: TDE Prime Contractor: GMV SOLUCIONES GLOBALES INTERNET SA
Subcontractors:
Fundaci?n para la Investigaci?n Biom?dica del Hospital Universitario La Paz • Spain
Universidad Complutense de Madrid • Spain
Objectives
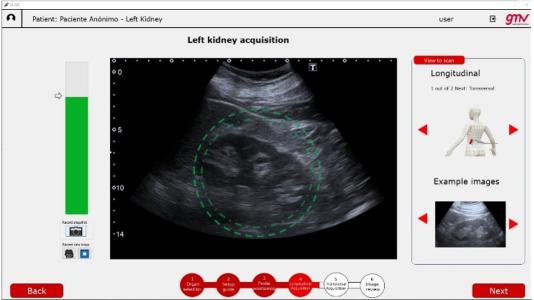
The objective of the present activity is therefore to develop a system allowing an autonomous medical image improvement during an ultrasound scan session with the objective of improving the reliability of medical diagnosis as well as increasing the precision of ultrasound-based research data.
Description
Medical imaging capabilities available in the ISS are today limited to an ultrasound scanner. While ultrasound offers a number of advantages, it also has several constraints, in particular in terms of operator dependence and difficulty in acquiring a high-quality images. In the field of medical imaging, ESA has for several years sponsored a number of activities focusing on ultrasound. Indeed, among various medical imaging techniques, ultrasonography (also known as echography) offers many advantages since it provides medical experts with real-time access to anatomical and functional information about the patient while being non-invasive and harmless. In addition, its implementation and use are quite straightforward partly because ultrasound scanners have become user-friendly, compact and lightweight systems compared to other medical imaging tools such as magnetic resonance imaging or X-rays based computerized tomography systems. Last but not least, ultrasonography is also more affordable than other medical imaging techniques. Its main drawback remains however its operator-dependence as skilled personnel are required to capture and interpret dynamic images. This is a source of concern for both clinical and scientific users, in particular when comparable images are required.Previous activities have been conducted to remotely control a motorised probe or a robotised probe-holder (mechanical arm), allowing an expert to position the probes and the image plane. Whilst viable for Low Earth Orbit, this approach would not be suitable for exploration missions, where transmission delays will become increasingly large.Considering future exploration missions, there is therefore a need to relocate the expertise within the vehicle, either by ensuring crew have appropriate training and experience, or by providing local intelligent assistance via systems on board the vehicle. One approach to address this need is an automatic system analysing the images computed from a probe located by the user and subsequently either providing position fine-tuning guidance to the user or fine-tuning automatically (according to range / degrees of freedom). An extreme concept could also be a fully automated system, where initial positioning is based on external anatomical landmarks and subsequent position fine-tuning by image analysis software and robotic probe control. Note: these are only examples which shall not constrain the proposed concepts.The activity includes the following tasks:- Review of the Scientific and Technical Background in order to consolidate the system requirements.- Safety: transversal task to the project (starting with task 1 and lasting until the end of the project). Task is required to generate the documentation to be submitted while requesting the authorizations to perform the scientific assessment (scientific evaluation) of the prototype.- Concept (including utilization scenarios), preliminary design and breadboarding- Detailed design (consolidation of the outcomes of previous task after approval by the Agency)- Manufacturing, assembly, integration and technical testing- Operational validation: comparison of image quality between pictures acquired by qualified radiologists- Recommendations and conclusions: this includes preliminary discussions on a flight model concept
• Application domain: Exploration
•
Technology Domain:
22 - Environmental Control & Life Support (ECLS) and In Situ Resource Utilisation (ISRU)
22 - Environmental Control & Life Support (ECLS) and In Situ Resource Utilisation (ISRU)
•
Competence Domain:
6-Life & Physical Science Payloads, Life Support, Robotics & Automation
6-Life & Physical Science Payloads, Life Support, Robotics & Automation
• Initial TRL: TRL 2
• Target TRL: TRL 4
• Achieved TRL: TRL 4
•HarmoRoadMap: N/A
•IPC Document: ESA/IPC(2017)3
•Public Document: